�����
(�Ƹ�ְҵ����ѧԺ ���� �Ƹ� 438002)
[����ժҪ]���������߳�����������Ĺ滮������8051����Ƭ�ij�����ƣ�������ֱ�������в������в����͵���Ƭ��֪ʶ���DZ�ר������Ҫ�Ļ���Ԫ�ء������߳���ͬ��һ������غ������ߵ����߳����������ó�����Ϊ�������룬���ɻ���Ѷ������̬�����Դﵽ��������������Ϊ��������不�ý�����ӵ�и߶��ǻ۲���ܵ����߳������ˣ������������ǵ������У���Ϊ不�ɻ�ȱ��һ����
[�ؼ���] ���߳�; ����; �в��� ; 8051����Ƭ; �������
Self-propelled vehicle research and design
Wujinxiu
(Huanggang Polytechnic College Huanggang 438002 Hubei)
[Abstract] produced by self-propelled vehicle that is in the overall planning of the 8051 single-chip program designed to control a DC motor and optical sensors. Knowledge of sensors and single-chip, is the most important basic elements of the topic. This self-propelled vehicle is different from the self-propelled vehicle is generally designed to walk along the black line, but to use as a control input by the feedback signal for the dynamic adjustment in order to achieve the desired behavior. I believe in not long future, with a high degree of intelligence and multi-purpose self-propelled vehicle robot will walk into our lives has become an indispensable part of.
[Key words] self-propelled vehicle; motor; sensors; 8051; program design
1��ǰ��
�ڿƼ����������ʱ���������ƶ�ʽ�����˻����߳����о��������൱�㷺���ѱ�ʹ�����Զ����ơ�ҽѧ����ҵ�����Ǹ�ʽ��ʽ�Ľ�ͨ���ߡ�������Ҳ������Ͷ�������力����力���ⷽ��������ϣ�Ҳ�о�����不ͬ�����ܵĻ����ˣ�例���ǻ��ͻ����ˡ������ͻ����ˡ����˰��˳�����������˵��о��������൱���졣���߳�����װ��������ɻ�е�����Ӻ�����Ĵ�������ϣ����߳�����ʵ�����е�Ӧ��Խ��Խ�㡣�ֽ�������У��������ָ�ʽ���������߳�����������������Ļ������з�Ҳ��Խ��Խ����������ֻ�ǼĶ�����Ϊ�����ǰ���������ܵ�ȫ�ܻ����ˡ�
1.1�������������
1.1.1�����
�Զ�����ʱ�����������������ռ����������㷺�����ã�ʹ���ǵ�������ӱ�������������Ҳ不�ϵ�������Сʱ������һ̨ң����������ң�������ٿط������ŷ�����ʵң��������不ֻ�������۳ˣ���������������������ĵط�������ɸ��ࡢ�����ѵ�������Ϊ̽�����Ρ����Ǿ�Ԯ��������С�ռ䣬��ֻ����С�ͻ�е����ĵط������������߳����з��Ѿ��м�ʮ年����ʷ了��Ҫ���һ̨���ܻᶯ�����߳������ϵ������������ӡ��������е�����֪ʶ�뼼�����༴�߱��������������������ϻ�����ѧ�����ƹ���ѧ����е力ѧ������ѧ��ѧ�ʣ����һ̨����8051����в������������Ƶ����߳���ʹ�ú�������Ϊ����ý�飬Ȼ�ӵ�·�����װ���ӡ�
1.1.2�о�Ŀ��
�Զ�������ҪĿ�ľ���ȡ����������ɹ�ȥ���˹�ʱ�����ﵽ��Ŀ�ꣻ���õ�Դ��·�������Ӹв�����·���Լ�����ϵͳ8051�����������������߳��� ����һ�������ϳ����ĺ����ߵĴ��ͺͽ�������ͨ��8051��Ƭ�������������ת��ʹ���ӿ������ɵ��н���δ�������ߵĿ��ƣ�Ҳ�������ڲ�ͬ����;��Զ��ң�صĻ�������Խ��Խ�࣬[1]�պ�Ҳ��ֻҪһֻ�ֻ��Ϳ���ң�����ǵĸ��ּҵ硣��������ֱ�������������·�����в����ĸв��·��������8051����д����ģ�����߳�����ϵͳ�Ķ�����
2��8051����Ƭ���
8051 ��Ŀǰ�����Ϻ��ܻ�ӭʹ�õĵ���Ƭ������֮һ������INTEL��˾�����������ձ��Ӧ���ڹ�ҵ���С�������ʹ���ռ���[2]������ư뵼�徧Ƭ�Ĺ�˾Ҳ��������8051 ���ݵĵ���Ƭ��������ATMEL ��˾�����������89C51 �� 13 ��Ƭ����INTEL ��˾��8051 ��ȫ���ݣ�������IJ�ͬ��89C51 �ǿ����ظ���¼�ģ���8051 �����ظ���¼����ѡ����8051 ����Ƭ��[3]��Ϊ����Ӳ���ܹ����ܱ��豸������ָ�����ǿ�̿ɸ�д���ܵ��������ƣ��������������ó����ģ�黯���������Ӧ�ã��������Ķ��������ġ�
�������߳��Ĵ���- 8051ʹ��5V��Դ�������ѡ��LM7805��ѹIC�ṩ�ȶ�5V��8051��ͼ2.1�ǹ�Ӧ8051��Դ��ʹ�õĵ�·��[4]��SW1��ͨ��LM 7805�漴����̶�5V�ĵ�Դ��8051ʹ�ã���·��ʹ�õ������������������ȶ����뼰�����ѹ��������Ϊ�����л�������ͻ�����Ԫ����
���ǽ����ϵ��ӡ��������е�ȷ����֪ʶ������һ��������ѵ�������������߸�ӦԪ��CYN70��LCD ģ�顢������·������ Ƭ�����Ĵ֣���ϵ�Դ��������������Ӳ����ѵ�����Ķ���ԭ������LCD ����ʾ�����ð����趨Ҫ�����ֿ�Ȧ����С�������趨�¶ȼ��������Ȼ��������ת��λ�¶ȸв⡢��������ת��������8051 ����Ƭ���ɳ���������жϺ�������·��ָ��������������������CYN70 �����߸в����ʵ��ת����̤����ģ��Ķ���������Flash ROM���ڲ�����4KB ROM �洢�ռ�, ����3V �ij���ѹ����,������MCS-51 ϵ�е���Ƭ��ȫ����,���������ڵ�·�����ʱ���ڲ��߱�ISP ������¼����,���ڶԵ�·���в���ʱ�����ڳ���Ĵ����Ļ�Գ��������������Ҫ�������ʱ���Ծ�Ƭ�Ķ�ΰβ��Ծ�Ƭ���һ������ ��ʾ�IJ�����LCD ����ʾ������LCD �߱��ĵ�͡���·�����ף����ѡ������ȱ���ǹ۲첻�ף������С���������ƾ�Ƭ����L293 ��Ƭ��L293 ��Ƭ��һ�ָ����ܵĿ��ƾ�Ƭ�����ȸߣ��������ס� ����������IJ��֣�ѡ��CNY70 �����߸в�Ԫ����[5]��������������ѡ��AD178A �ṩת����·����·�����ͼ2.1��ʾ��
ͼ2.1��·��Ʒ���ͼ
3��ֱ������
3.1ֱ���������ԭ理
ֱ�������������������IJ�����������ת�٣�ת��������������ת�������Ծ�Ϊ���Թ�ϵ�������һ����Ҫ����ת�١�ת�ؿ��Ƶij����У�[6]�����ƾ��Ȳ���ܸߵ�����£�ͬ����ֱ��������Ϊ�¶����ǽ�Ϊ���õ�ѡ��
Ҫ����ֱ������������Լ�ֹͣ����ʹ��ͼ3.1.1��ʾ�Ĺ��伫��靈�ٵ�路
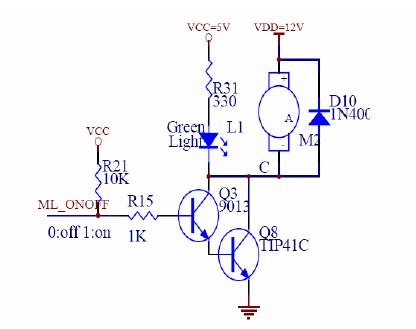
ͼ3.1.1ֱ������������ֹͣ��·
����ɣ��������ML_ONOFF=1ʱ���羧��Q3��Q8���͵�ͨ��C��ԼΪ���͵�ѹ0.3V���������M2��������ʾ��L1亮����֮���������ML_ONOFF=0ʱ���羧��Q3��Q8 ��ֹ不ͨ��C�㸡�ӣ��������ֹͣ��L1不亮��[7]������ML_ONOFF=1����ת��ʱ����ԴVDD��������Ȧ��磬����Ȧ�ϴ���了��量��������ζ�理����ML_ONOFF=0��C�㸡��ʱ������Ȧ���˽�����һ����綯��VR������NΪ�������Ȧ�������˸���ѹ����VDD������C���γɼ��ߵĵ�ѹ���dz���易�Ե羧��Q3��Q8����ƻ�����ˣ�Ϊ�����羧������������Ȧ����綯�Ƶ��ƻ�������M2���˽Ӷ�����D10�����羧���ֹ������綯�Ƴ���ʱ���������յ������ﵽ�������á�
3.2ֱ����������������ѡ�÷�ʽ
��ͼΪ12����ֱ��������������ͼ������Ϊ���ת�أ�������ֱ�Ϊת�١������Լ�Ч率�������率��
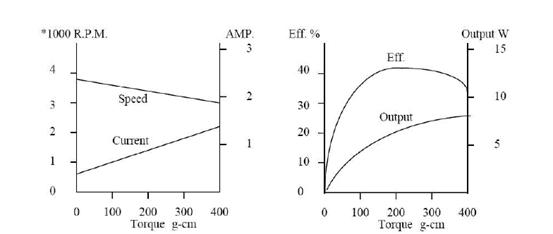
ͼ3.1.2ֱ��������������ͼ
ѡ�ö�力�綯��ʱ���뿼量�����ذ���������ɴ�С���������Ť力����ת���������ԣ�ͬʱҲҪ���ǵ�Դ��ʽ����תģʽ����ѡ��ֱ������ʱ������ע�����Ĺ�����ѹ��ֱ�������Դ��見���ΪDC12V��DC24V������������ΪAC110V��AC220V�����Ҫ֪�����Ť�ش�С(g-cm��kg-cm)���Լ�ת��(rpm)����Ȼ������������������ߣ������ת��ͼ�����ת��ͼ�ȣ��Է�便��Ϊѡ������ʱ�IJο�������Ť力����ʱ���ȼ�������ת������ת����量���ٲο���ת��度�������ٱȣ�Ȼ��������﹤��Ť力ֵ������������������ѡ��������ʽ��
3.3 ֱ������������·��
����������߳�������˫��ֱ������������������ͼ��ʾ��
ͼ3.1.3(a) ˫��ֱ������������
H-Bridge���ⲿ�����������߳���Ӳ�岿�֣�ռ�м��ش��λ�á��������߳�������˵��Ӱ��H-Bridge ��Ϊǰ�缶���루բ��������·��������Ϊȷ���ۼ䲻���·����H-Bridge ������࣬����ѡ����POWER MOSFET �����ٿ��ƿ���ON/OFF ���л���ԭ�����£�
1���ܹ������л���
2���ڽϸߵ�֮�£����нϵ͵ĵ�ͨ���衣 DSVDS(ON)R3�ϵͣ�Ҳ����˵����ʹ�ýϵ͵�բ����ѹ������ ��POWER MOSFET �Ա�װһ���ֶ����壬�Ա���POWER MOSFET ������������������RC ��·���������Ƶ羧��tvdd�����������բ���ݣ�ΪH-Bridge ��ǰ����·������������������ת��ʱ������Ƶ���ţ����CPU�������Լ�����H-Bridge �ıۼ��·��[8]����PWM������������ PWM ��һ��������������ת�ٵķ���������������ĵ�ԴΪhigh ʱ�������ܵ���ѹ��Ӧ��ת����������Ϊlow ʱ����û�е�Դ��Ӧ�������ʱ������ű����Ĺ���ת����ת�ٻ��������ֹͣ�����PWM ��һ�����õ�Դhigh��low ���л�����������ת�ٵķ����������������ڱ���̶���Ȼ���ٽ��ɸı������IJ����ȣ�Duty Cycle��������������֮�ȣ��ﵽ�ı��ٶȵ�Ŀ�ġ��������ȷ����仯ʱ�����������ƽ�����������仯������ת�ټ������ı䡣
4���̵���
�̵���(Relay)��Ҳ�Ƶ��䣬��һ�ֵ��ӿ��������������п���ϵͳ���ֳ������·���ͱ�����ϵͳ���ֳ������·����ͨ��Ӧ�����Զ����Ƶ�·�У�[9]��ʵ�������ý�С�ĵ���ȥ���ƽϴ������һ���Զ����ء����ڵ�·�������Զ����ڡ���ȫ������ת����·�����á��̵�����һ�㿪�ز�ͬ���̵��������Ի�е��ʽ���ƣ�����һ���Ե�����������л�����ĵ��š�
4.1 �̵���ѡ��
��ż̵�����һ�ֵ�·����Ԫ������������Ҫ�Զ�������֮�������豸�У�����ͨ�Ž���������ҵ���ơ����������������ƾߡ����ϵ繩��ϵͳ�ȡ�����Ȧͨ���ʹ���ĵ��������IJ������ԣ�������İڱ����£����۵��Ҳ�����ʹ���Žӵ���ӣ�ʹ���ӵ��γ�ͨ·��
��Ҫ���죬���ɵ��������Ȧ������·������������ɡ���ż̵����Ļ���ԭ����������Ȧ���˼��϶�ĵ�ѹ��һ���ĵ�����ͨ����Ȧʹ��Ȧ����γɵ�������Ӷ������������֮�ɶ����ݣ���ʹ��·����ͨ�����á���ż̵����Ĵ�����������Ϊ�����㡢�����㡣����·���÷�Ϊ�������㡢���մ���. ������Ȧδͨ��ʱ���ڶϿ�״̬�ľ����㣬��Ϊ��������( NO) �����ڽ�ͨ״̬�ľ������Ϊ���մ���( NC)������̵��������˵��Žӵ���Ŀ��ͬ����Ҫע����Ȧ�Ĺ�����ѹ��ֱ�����ǽ����磬ʹ�õĵ�ѹ������С���л������͵�ѹ�̶ȵȣ��̵����Ĺ����3V��6V��9V��12V�� 24V��48V��100V��110V��200V��220V�ȣ�
������ʹ��˫��˫�еļ̵��������а�֧�ӽš�Ϊ5V��ֱ���̵�����8051��I/O Pinͨ������ֱ���ƶ��̵�������Ȧ�����������ƶ��̵�����Ȧ�ķ����ܶ࣬�羧�忪������㷺�����õķ�ʽ��
ͼ4.2 ˫��˫�м̵���
��8051 I/O pin Ϊ�ߵ�λʱ��PNP�羧���E - B����˳��ƫѹ��PNP�羧���E - C������ͨ��NPN�羧���B��û�е�ѹ�� NPN�羧���C����E������ͨ����ͬ��·���̵�����Ȧ������8051 I/O Pin Ϊ�͵�λʱ��PNP�羧���E - B���õ�˳��ƫѹ��PNP�羧���E - C����ͨ��VCC���͵�NPN�羧���B������ʱNPN�羧��B����E���д���0.7V��˳��ƫѹ��ʹ�羧�幤�����羧���C����E�����ֵ�ͨ�����̵�����Ȧ��
4.2 ������Ӧ
������ʱ����˷��������ͬ��·״̬����ѹֵ����Vcc�͵��Ƚ�����������ˣ����Ƚ����ĸ����������������ͬ��ֵ�ĵ����ѹ����ѹֵ����1/2 Vcc���Ƚ�����������˵�ѹ���ڸ�����ˣ����ԱȽ��������ΪVcc��Ҳʹ555 IC����������ڲ������ĵ͵�λ״̬������������˷��Ӧ��ʱ����˷�����˲���½����Ƚ�����������˵�ѹ�漴�½�����С�ڱȽ���������˵�1/2 Vccʱ���Ƚ����������ת̬ΪLow������555 IC�Ĵ���(Trigger)���룬ʹ555 IC���������3�ţ�����һ�������壬��8051����ȡ�ô��������źţ���ִ�����Ӧ�Ĺ��ܡ�
5������
��в���Ϊ���ù����Լ�֪�����һ�ָв�����ʹ���Ϸ�Ϊ���ࣺ(1)�����ͣ���Դ��й�Ԫ�����ŷ��ã������Ƿ��Ա��淴�����жϱ���ķ�ʽ�� (2)�ڹ��ͣ���Դ��й�Ԫ�����������λ�ã����ӹ�Դ�����й�Ԫ���Ĺ��߱��ڶ�ʱ�����ж�����б�����ڵķ�ʽ����в���ʹ�õĹ�������з�Ϊ�ɼ��⼰���������֣��ֱ��Ϊ�ɼ���в����������߹�в������ɼ���Ļ��������ܻ�����Ӱ�죬����ɼ���ᱻ��ɫ���ա�ʹ�ú����ߵĺô��ǣ��䲻���ܵ�����������Ӱ�죬�����ں�����������������ȷ���䶯����
5.1 CNY70
5.1.1 CNY70�ڲ��ṹ
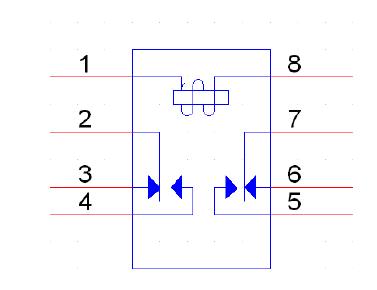
 �в������������Զ�������ռ���൱��ĵ�λ�������ǵ�����Ҳ����Ҫ�õ��в����������IJ���һ�����������������ڸв���Ƴ����ڵ�λ�����ڲ��ṩ����ʱ·��״����֪��CPU �����ж��Ƿ�����н���CNY704.2.1 CNY70 �ڲ��ṹCNY70 ���ڲ��ṹ��ͼ5.1��ʾ��
�в������������Զ�������ռ���൱��ĵ�λ�������ǵ�����Ҳ����Ҫ�õ��в����������IJ���һ�����������������ڸв���Ƴ����ڵ�λ�����ڲ��ṩ����ʱ·��״����֪��CPU �����ж��Ƿ�����н���CNY704.2.1 CNY70 �ڲ��ṹCNY70 ���ڲ��ṹ��ͼ5.1��ʾ��
ͼ5.1��в���CNY70�ڲ��ṹ
���а��������߷�������壬��羧�壬�Լ����˲������书�ֱܷ��ǣ� 1.�����߷�������壺���Ʒ��������(LED)�Ĺ��ܣ���PN ���˼���˳��ƫѹʱ�ɷ�������Ϊ800nm �ĺ����߲��ɼ��⡣ 2.��羧�壺 Ϊһ���Ժ����߲��������з�Ӧ�Ĺ����Ԫ��������羧���ܺ����߹�����ʱΪ���迹����δ�ܹ�ʱ���ָ��迹�� 3.���˲�����Ψһ���ò���Ϊ�����߸�������ͨ�����˹�������������ǿ��羧����ӿ�Ѷ����(���������ⲻ�ɼ���ɼ���ĸ���)��
5.1.2 CNY70 ����ԭ��
CNY70 ��в��������Դ�в�Ԫ��������һ���䶯���ǹ�������ͨ���棬�ͻᷴ�䵽�в�Ԫ������������ɫ�����ᱻ���գ�����������߳�ʹ�������Ź�в�������Ŀ����������ɫ������·�����ṩ״����8051���������жϡ��䶯��ԭ����5V��220 ������������CNY70�Ĺ�ԴLED��A�ţ�K �ӵء���CNY70 ����ͨ������ʱ����羧����յ�����⣬E ������ߵ�λ���ں�ɫ������ʱ��û�н��յ���ʱ����Ϊ�͵�λ������CNY70 ��E �ӽ����з�����ʱΪ�ߵ�λ5V����������ʱ��Ϊ�͵�λ0V�����DZ������������ʹCNY70 ȥ�в���ź������8051 ��Ϊ���롣���� CNY70 ��E �ӽŵĵ�λҲ����Ϊ���ܵ������Ķ�Ѷ������仯����һֱȷ��ά��0V ��5V ��������������DZ��ں�����˸�74LS14 IC ��ʹѶ�����跴�����͡�74LS14 ���IC �ڴ˵�·�����ݵĹ�����һ������������CNY70 E �ӽ���� Ϊ0V ʱ������74LS14 ��ᷴ�����5V ���ȶ���ѹ�������ǣŽӽ�����ĵ�ѹ ����0V ʱ��74LS14 ��ԵĻ�ȫ���������0V �ĵ͵�λ�����8051 ����Ծ�ȷ���жϹ�в��������Ľ����������������ȥ�������� ��Ϊ�˵�����·�������ȣ�����ͬʱ�ڣŽӽŽ��˸�SVR 50K�� �Ŀɱ���裬Ŀ�����ڵ�����·�������ȣ���SVR 50K�� ��Сʱ��������羧����伫�����ɣŽϴ���˹�羧������ױ��ͣ������ȱ���෴�أ���SVR 50K�� ����ʱ�������ȱ�С����ʵ�ʵ�Ӧ���У�Ϊ����ѵ������ȿ��ƣ�Ӧ�ڲ�ͬ�Ļ�������ʱ����SVR 50K���Ĵ�С�������߳����ڰװ���ʱ�������߸в��·��CNY70֮���������������ĺ����߾��װ巴������羧�壬��羧�履�ϣ��伫��ѹΪ��̬����˾�������IC 4584ȡ����������̬��ָʾ��(LED)����������CNY70�ڵ繤���������ĵ�����·��ʱ����繤����Ϊ��ɫ�����⣬���CNY70���������������ĺ���������������羧�壬��羧�弸����ֹ���伫��ѹΪ��̬������ѹ��4584ȡ��������Ϊ��̬��LED����
5.2�в���������·
���ص�Դ����330�������������ṩ�������߷������ȶ��ĵ�ѹ����ʹ�����߷������ȶ��������ط��������ߡ�����羧����յ�������ʱ(��ǽ)�����羧����������ȵĴ�С�����ͣ�ʹVe �ӽ�5V���پ���4584��ʷ���ط���������ʹ���Vb ����0V���ٽ��������I/O ���ƾ�Ƭ8255 ����������ʹ��500K�ɱ�����Ŀ�����ٵ�����·�������ȣ���500K �ɱ�����Сʱ��Ie �ϴ�羧������ױ��ͣ�Ҳ���������Ƚϸߣ��෴�ģ���500K �ɱ�������ʱ�������Ƚϵ͡� IC4584 ��һ��ʷ���ط��������������ʷ���ش������Լ�����բ�Ĺ��ܣ�������ʹ��ʷ���ش�������Ŀ�ľ��ǹ��������ţ��ѱ�������С�䶯��ʹ���״̬�ı䡣
ͼ5. 2 �в���������·
5.2.1 ������ң��
��������Ŀǰ�����һ������ͨѶ���ձ�ʹ���ڼҵ��Լ���߲�Ʒ������ӡ����졢錄��Ӱ������������DVD��MP3 Player��ң�س��ȡ�������ң��֮���Ա�������ʹ�ã���Ҫ����Ϊ������װ�����С���ɱ��͡��ĵ��ټ�Ӳ��������ס�һ����˵��������ң��ϵͳ�ɷ������ͽ���������������ɡ�
�ճ�����������ô������߹�Դ����Ȼ���ң����ɸ��ţ����Ե���һЩԤ����ʩȷ��ͨѶ��ȷ��������ŵĽ�ҩ�ǵ���(Modulated)�����ǽ����ٶ����ʵ��������������������Ȼ��©�ӡ���ͬ�ĵ���������Modulation ��IR LED ���ض���Ƶ����˸��Receiver ��Ҳ������ͬ����Ƶ�ʣ�����Ժ��Ը��š�����ͼ�У����Կ�������Ѷ��(Modulated Signal)������IR LED ����Ѷ�ţ�������Ѷ��������ֱߵ�Receiver �ܳ�����

ͼ5.2.1 ����Ѷ������IR LED����Ѷ��
�����߷��䡢��������װ�������߳��ϣ��Է���ķ�ʽ�в����������ڷ�Χ֮ �ڡ�ʹ�ú�������Ϊ�в�ý�����ɫ���ٶȿ죨����ڳ������в⣩�����������߳�������ʱ�䷴Ӧ�������ڷ������õ�����£��в����ɴ�30 ���������Ҿ���ǿ�ҵķ����ԡ�Ϊ�˱�����Χ�����ĸ��ţ��ڷ����������8051 ��������A����������������߷����·���ú����߽����ز�B ����ʽ���͵����յ�·�������һ�˲�����ȥ����Ѷ��C ����Ѷ�����Ա���Ѷ�ŵĿɿ��ԡ��������ǽ��Ŵ����Ҳ��źž���һ��������ɵõ�ֱ���ź�E������A/D ת�����ɵõ�һ��8bits ��λѶ��F������֮����8051 �������ж�֮���ͳ�4bits �Ŀ���Ѷ��G ������������·�Կ������������ʵ��ķ�Ӧ�������������պ����߷���������Ѷ�ţ��ٷ���Ѷ�Ÿ�8051��
5.2.2�����ͺ����߸в�Ԫ��
�в�Ԫ���Ƚϸв��·���������������ĸо����������ÿ��ġ������Ļ���������֫ȥ�����ģ������У�����Ҫ��Ī���ڸв�Ԫ����ѡ����Ϊ�в����ĸвⷽʽ�������Ƚ��������ܱ����״����������ֱ�ӵķ���Ѷ�ţ��ṩCPU �����жϣ���������ʹ�õ��ǽ����ͺ����߸в�Ԫ������Ҫ�Ǹ�Ӧ�������¶ȵ�����)������ĺ����ߡ��������ƶ�(�¶��б仯)��ʱ���ڸв����Ľ�����ϲ�����ɵı仯��ת�ơ������ͺ����߸в�Ԫ��������TGS��PZTΪ���ϣ����������ߵı仯��Ȼ�������ĵ�ɱ仯����ʹ�ã����ڽ����֮�ӵ�����TET���ѵ�ɱ仯ת��Ϊ��ѹ�仯�������˹��������в�����ֻ��������¶��������ĺ����߲�������õķ�Ӧ��������(�˵��ֻ�����)�ƶ���ʱ���ڽ�����ϲ�����ɵĸı���ת�ƣ�ʹ����R�ϵõ�С�ĵ�ѹ�仯���پ�FET����(�Ŵ���1��)����S�������
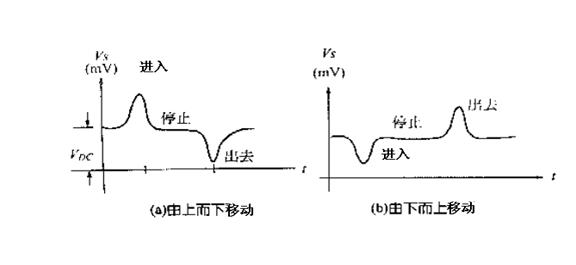
ͼ5.2.2 ����ʱV�ı仯 S
�ɶ������ε�֪������������в�����
(1)�����ѹVS�dz�С(mV)����(����Ŵ���ǧ��)
(2)��������ƶ������е�ѹ�仯����(�����¶�����)
(3)�����¶Ȳ�ͬʱ�����в�ͬ��VDC����(����ʹ�ý����Ŵ��ܿ˷�VDC�IJ�ͬ) ���ͺ����߸в����������ѹ�dz�С������С��1mV���£�����õ������ص����ʱ���Ʊ�Ҫ�Ŵ���ǧ���������������Բ���ֻ��һ���Ŵ���Ϊ�ԷŴ������ԣ��Ŵ�����Ƶ���ij˻�Ϊ������
�Ŵ��� �� Ƶ�� �� ����
 ��ҪƵ����һ�㣬����������Ŵ���
��ҪƵ����һ�㣬����������Ŵ���
 �Ŵ��ʴ��ʱ��Ƶ�����խ
�Ŵ��ʴ��ʱ��Ƶ�����խ
���ö༶���ӷŴ��ʱ�������治��̫��һ��ϲ����ܸ��Ż��������������ÿһ��������һ����Ƶ��������Ŵ���Ϊ50�����Ӻ����Եõ�Լ2500���������ѹVS��С����һ��ʼ�ʹӵ�Դ��Ӧ��Ѷ���پ������ǧ���ķŴ����ֱ�����ȷ�ĸ�Ӧ�źţ�������Ѷ����ɵĸ��ţ������ڸв����ĵ�ԭ�ȼ��Ϩ���������·�����ʳ���Դ�ڵĸ����źš�
 5.3���߳���·
5.3���߳���·
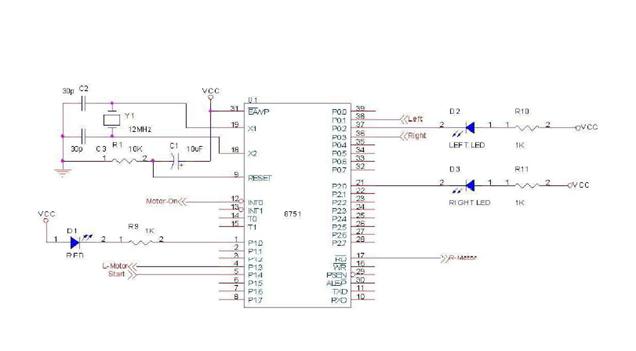
���߳������ṹ��ͼ��
ͼ5.4���߳�8051�ܵ�·ͼ
 }
}
ͼ6���߳�ȫò
��������
�˺�����ң�س�ʹ��KEIL C51 C ���Գ���ʹ�������Ȱ�װKEIL uVision 2 �ı�����������ص�8051 C ����ԭʼ�����룬����KeilC51 ��Ŀ¼�¡���װ��KEIL uVision 2 ����KeilC51 Ŀ¼��ֱ�ӵ�ѡHCR101 ���project file ���ɡ�
����ṹ��Ҫ�ֳ�3 ������ģ�飺 Main.c��������ִ行��Ҫ�ij����·����Ӧ��������س��������Լ�����ƺſ��ơ�SensorIn.c ��SensorIn.h����Ӧ������⡢�����źŵ��������� Tick.c ��Tick.h����ʱ���жϴ������ṩ���ӿ�ʱ�䣬���ڱ��ӳ�ʱ����㡣 [19]��Keil uVision2 �������¼��HCR101.HEX �������EXE ��Ŀ¼�¡�
3.2.1 Ѷ�����뼰�ȴ�ģʽ
�������߳��Ķ���ȫ��Ѷ������������������Ѷ�ŵ�������Ϊ��Ҫ���ֽ����ͺ����߸в�����������Ѷ��Ϊһ����Ѷ�ţ������ٶ���������ΪѶ�ŵ���ʧ���ʹ�ֹͣ������ȵ�ȷ������λ������Ϣ�������������ʧ���µ�������δ����ǰ�����뱣��һ��ǰһ������Ѷ�ŵġ�����������8051�ڶ�����ʱ����Ȼ�ܹ��������ݡ�
Ȼ����û��Ѷ�������ʱ��ͱ������ȴ�ģʽ���ȴ�ģʽ����ҪĿ���Ǽ�ʱ���Ա���û��Ŀ���������£�5��������Ѱģʽ�����ж�����Ѷ�����뵽�Ƿ����ȴ�ģʽ����8051�Ĺ���ʱ����˵��ֻ��Ҫ15us����˲��ݻ��д��������η�����
3.2.2 ��Ѱģʽ������ʽ��
�������������£�˳���Ĵ�sensor������Ҫ�v��Ŀ�������ڵ�Ѷ�ţ��ͻ����(1) ����ʽ���������٣���������������ĵȴ�ʱ������֮����û�����κ�Ŀ�����Ѷ�����룬�ͻ����(2) ��Ѱģʽ���������£�
(1) ����ʽ��
����ʽ�Ĺ��þ��ǽ���Ӹв���������Ѷ�ţ����Ҽ����жϣ�����������Ԥ�ڵķ�Ӧ���������ұ߸в�����Ѷ��ʱ��ת���м�в�����Ѷ��ʱֱ�еȵȡ�����Ƶ�ԭ���ǰѲ�������������źŴ����8051���������ݴ����У��������һ������Ҳ�������֮��꣬������ָ��(RL)������ָ��(RR)�������������ת��ת�����Ѷ�źͿ�������ת�ij�ʽ
29
�������ǻ�������ģ��������ĺô��ǵ�Ҫ�ı��б����ʱ������Ҫ��������ȵ�������ֻҪ�ĵ�һ���ݾͿ����ˡ�
(2) ��Ѱģʽ��
��Ѱģʽ��Ϊ��Ѱ��Ŀ�꣬�õ������λ�õ�Ѷ�Ŷ���Ƶģ����ԭ���ǰ���Ѱģʽд������ʽ֮ǰ����û���κ����룬�ֳ����ȴ�ʱ��Ļ����ͻᶪ������ʽһ�����ٵġ�����Ѷ�ţ�ʹ֮��ת180��������ת180�����������ת�ص�ԭ����λ�á�֮����ʹ�á��ٵġ�����Ѷ�ţ�ԭ����ͬ�����Դ��������������ת��Ŀ�ģ����ֲ���������Ѱģʽ��д������������ת���ظ����֣������˳�ʽ���ݵĸ��Ӷȡ���������ж�Ѷ�������Ǽ٣�ֻҪ�ڽ���Ѷ�ŵ���ǰ�˳�ʽ���ݣ�����һ��α��꣬���κ�ʱ��ֻҪ�����źš���������Ϊ�㣬�Ͳ���������Ѱģʽ���������ٵ�Ŀ����֮�������µȴ��˳����趨��ʱ�䣬�Ż��ٶȽ�����Ѱģʽ��
30
�����б���ע��˵��
��Main.c��
#include <reg51.h>
#include "tick.h"
#include "sensorin.h"
#define WHEEL_FORWARD 1 //������ǰ
#define WHEEL_BACK 0 //�������
#define MOTOR_ON 0 //������
#define MOTOR_OFF 1 //����ֹͣ
#define MOVING_STRAIGHT 0 //ֱ��狀̬
#define MOVING_LEFT 1 //��ת狀̬
#define MOVING_RIGHT 2 //��ת狀̬
#define BLINKONTIME 2 //��������ʱ��
#define BLINKOFFTIME 50 //�������ʱ��
sbit LeftMotorDir = P1^5; //���������﷽��
sbit RightMotorDir = P3^7; //���������﷽��
sbit MotorSwCtrl = P3^4; //�������������Դ
sbit MotorSwLed = P0^5; //��������ʾLED
sbit RunBackLed = P0^7; //��ת��ʾLED
sbit BlinkLed = P0^3; //����LED
sbit RunLeftLed = P0^0; //��ת��ʾLED
sbit RunRightLed = P2^1; //��ת��ʾLED
void BlinkLight(void);
bit fBlinkOn;
unsigned int BlinkDelay;
unsigned int BlinkTimeRec;
main()
{
unsigned int SensorStatus,LastStatus;
unsigned char MovingDir;
bit fMovingForward;
//ϵͳ��ʼ�趨
LeftMotorDir = WHEEL_FORWARD; //�������ʼ��ǰ
RightMotorDir = WHEEL_FORWARD; //�������ʼ��ǰ
MotorSwCtrl = MOTOR_OFF; //����ر�
MotorSwLed = 1; //�����ƺŹر�
InitSensorIn(); //��ʼ��Ӧ����狀̬
InitTick(); //��ʼ��ʱ��
LastStatus = SEN_None; //��һ狀̬��Ϊ��狀̬
fMovingForward = 1; //Ԥ�賵��ǰ�����
MovingDir = MOVING_STRAIGHT; //����ʼ狀̬��Ϊ��ǰ狀̬ //���Ƴ�ʼ�趨
fBlinkOn = 0;
BlinkDelay = BLINKOFFTIME;
BlinkTimeRec = GetSystemTick();
while (1)
{
BlinkLight(); //��˸�ƺŴ���
SensorStatus = GetSensorStatus(); //��ȡ��ť��Ӧ����狀̬
if (SensorStatus != LastStatus) //��鰴ť��Ӧ����狀̬�����иı�
{
// ��ť��Ӧ����狀̬�иı�, ִ行���Ӧ�Ĺ���
switch (SensorStatus)
{
case SEN_Start: //��������رհ�ť
if (MotorSwCtrl == MOTOR_ON)
{
MotorSwCtrl = MOTOR_OFF;
MotorSwLed = 1;
}
else
{
MotorSwCtrl = MOTOR_ON;
MotorSwLed = 0;
}
break;
case SEN_Forward: //��ǰ��ť
// �趨����ǰ
LeftMotorDir = WHEEL_FORWARD; //�趨��������ǰ
RightMotorDir = WHEEL_FORWARD; //�趨��������ǰ
RunBackLed = 1; //�رյ���LED
fMovingForward = 1; //�趨��ǰ���
break;
case SEN_Back: //���ť
// �趨�����
LeftMotorDir = WHEEL_BACK; //�趨���������
RightMotorDir = WHEEL_BACK; //�趨���������
RunBackLed = 0; //����LED
fMovingForward = 0; //�����ǰ���
break;
case SEN_Left: //��ת��ť
if (fMovingForward)
{ //ǰ��狀̬������ת
LeftMotorDir = WHEEL_BACK; //�趨���������
RightMotorDir = WHEEL_FORWARD;//�趨��������ǰ
}
else
{ //����狀̬������ת
LeftMotorDir = WHEEL_FORWARD; //�趨��������ǰ
RightMotorDir = WHEEL_BACK; //�趨���������
}
RunLeftLed = 0; //����תLED
MovingDir = MOVING_LEFT; //�趨��ת���
break;
case SEN_Right: //��ת��ť
if (fMovingForward)
{ //ǰ��狀̬������ת
LeftMotorDir = WHEEL_FORWARD; //�趨��������ǰ
RightMotorDir = WHEEL_BACK; //�趨���������
}
else
{ //����狀̬������ת <, BR>LeftMotorDir = WHEEL_BACK; //�趨���������
RightMotorDir = WHEEL_FORWARD; //�趨��������ǰ
}
RunRightLed = 0; //����תLED
MovingDir = MOVING_RIGHT; //�趨��ת���
break;
case SEN_None: //����狀̬
// �ް�ť��Ӧ
if (MovingDir != MOVING_STRAIGHT)
{ // ����ת����ת�зſ���ť
if (fMovingForward)
{ //��Ϊ��ǰ狀̬,�����ó�������ǰ
LeftMotorDir = WHEEL_FORWARD;
RightMotorDir = WHEEL_FORWARD;
}
else
{ //��Ϊ����狀̬,�����ó��������
LeftMotorDir = WHEEL_BACK;
RightMotorDir = WHEEL_BACK;
}
RunLeftLed = 1; //�ر���תLED
RunRightLed = 1; //�ر���תLED
MovingDir = MOVING_STRAIGHT; //�ص�ֱ行狀̬ (ǰ����)
}
break;
default:
break;
}
LastStatus = SensorStatus; //����˴ΰ�ť��Ӧ狀̬
}
}
}
/*------------------------------------------------ -----
��˸�ƺŴ���
-------------------------------------------------- ---*/
void BlinkLight(void)
{
if ((GetSystemTick() - BlinkTimeRec) >= BlinkDelay) //�����������ʱ�䵽
{
BlinkTimeRec = GetSystemTick(); //��¼Ŀǰ�ӿ�ʱ��
if (fBlinkOn) //�Ƿ�Ҫ��
{
BlinkLed = 0; //������
BlinkDelay = BLINKONTIME; //��������ʱ��
fBlinkOn = 0; //����ʱ�䵽����������
}
else //������ֱ����
{
BlinkLed = 1; //������
BlinkDelay = BLINKOFFTIME; //�������ʱ��
fBlinkOn = 1; //���ʱ�䵽����������
}
}
}
��SensorIn.h��
#define KeyPort P1 //��ť��ȡ��
typedef enum KeyStatusEnum {
SEN_None = 0x000,
SEN_Right = 0x001,
SEN_Left = 0x002,
SEN_Back = 0x004,
SEN_Forward = 0x008,
SEN_Start = 0x010,
} KeyStatusType;
#define KP_MASK (SEN_Forward | SEN_Start | SEN_Back | SEN_Left | SEN_Right)
#define AnyKey() ((KeyPort & KP_MASK) != 0) //��������κΰ�ť������
#define GetKey() (KeyPort & KP_MASK) //��ȡ��ť狀̬
unsigned char GetSensorStatus(void);
#ifndef SENSORIN_C
extern unsigned char KeyStatus;
#endif
extern void InitSensorIn(void);
extern void ScanSensorIn(void);
��SensorIn.c��
#define SENSORIN_C
#include <reg51.h>
#include "sensorin.h"
#define BOUNCE_CNT 3
typedef enum KeyPhaseEnum {
KB_Idle,
KB_Debounce,
KB_Pressed
} KeyPhaseType;
unsigned char KeyPhase;
unsigned char KeyStatus;
unsigned char KeyRecord;
unsigned char BounceTime;
/*--------------------------
ɨ������趨
--------------------------*/
void InitSensorIn(void)
{
KeyPort |= KP_MASK; //����ť�������Ϊ����狀̬
KeyPhase = KB_Idle;
KeyStatus = SEN_None;
KeyRecord = SEN_None;
BounceTime = 0;
}
/*--------------------------
��ȡ��ťɨ��狀̬
--------------------------*/
unsigned char GetSensorStatus(void)
{
return KeyStatus;
}
/*--------------------------
��ťɨ��δ���
--------------------------*/
void ScanSensorIn(void)
{
switch ( KeyPhase )
{
case KB_Idle: //���ý�
if (AnyKey()) //������ް�ť������
{ //���ְ�ť������
BounceTime = BOUNCE_CNT; //�趨��������ʱ��
KeyPhase = KB_Debounce; //�趨�¸���Ϊ���˵�����
}
break;
case KB_Debounce: //���˵�����
if (--BounceTime == 0) //�������˼�����1,������Ƿ�Ϊ0
{ //�������˼�����ʱ,��ʾ��ť狀̬���ȶ�
if ( AnyKey() )
{ //�а�ť������
KeyStatus = GetKey();
KeyRecord = KeyStatus;
KeyPhase = KB_Pressed; //�趨�¸���Ϊ��ť���½�
}
else
{ //û�а�ť������
KeyPhase = KB_Idle; //�趨�¸���Ϊ���ý�
KeyStatus = SEN_None;
}
}
42
break;
case KB_Pressed: //��ť���½�
if ( KeyRecord != GetKey() )
{
/* ��ť狀̬�иı�, ��ص����˵�����������µİ�
ť狀̬ */
BounceTime = BOUNCE_CNT;
KeyPhase = KB_Debounce;
}
break;
default:
break;
}
}
��Tick.h��
#define TICK_INTERRUPT_PERIOD_MS 10 //�ӿ�ʱ���ж�����(ms)
#define MS_20 (20 / TICK_INTERRUPT_PERIOD_MS)
#define MS_30 (30 / TICK_INTERRUPT_PERIOD_MS)
#define MS_40 (40 / TICK_INTERRUPT_PERIOD_MS)
#define MS_50 (50 / TICK_INTERRUPT_PERIOD_MS)
#define MS_100 (100/ TICK_INTERRUPT_PERIOD_MS)
#define MS_200 (2 * MS_100)
#define MS_300 (3 * MS_100)
#define MS_400 (4 * MS_100)
#define MS_500 (5 * MS_100)
#define MS_600 (6 * MS_100)
#define MS_700 (7 * MS_700)
#define SEC_1 (10 * MS_100)
#define SEC_2 (2 * SEC_1)
#define SEC_3 (3 * SEC_1)
void InitTick(void);
unsigned int GetSystemTick(void);
��Tick.c��
/*------------------------------------------------ --
ϵͳ�ӿؼ�ʱ�жϷ���ʽ
-------------------------------------------------- */
#include <reg51.h>
#include "system.h"
#include "tick.h"
#include "sensorin.h"
#define TICK_INTERRUPT_PERIOD_CNT
(((XTAL*TICK_INTERRUPT_PERIOD_MS)/1000)/12)
/************************************************* ********
MICRO_ADJUST = ��ʱ���ж�ʱ��ȷ���������ж�����λ=ָ��ʱ��, ֵ���������(�ж�����ʱ�����)
У��ʽ����117 ��ʱΪ����24 Сʱ���������������MICRO_ADJUST
��6MHz(1 ����=2us),100ms �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ�������:
100ms �ж�һ��=> ÿ���ж�10 ��,ÿ��/�̶ȵ���: 10/2us = 5us
24 Сʱ = 24*60*60 �� = 86400 ��
24 Сʱ�ı䶯 = 86400 * 5us = 0.432 ��
��12MHz(1 ����=1us),50ms �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ�������:
50ms �ж�һ��=> ÿ���ж�20 ��,ÿ��/�̶ȵ���: 20/1us = 20us
24 Сʱ = 24*60*60 �� = 86400 ��
24 Сʱ�ı䶯 = 86400 * 20us = 1.728 ��
��12MHz(1 ����=1us),1ms �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ�������:
1ms �ж�һ��=> ÿ���ж�1000 ��,ÿ��/�̶ȵ���: 1000 * 1us = 1ms
��24MHz(1 ����=0.5us),10ms �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ�������:
10ms �ж�һ��=> ÿ���ж�100 ��,ÿ��/�̶ȵ���: 100/0.5us = 50us
24 Сʱ = 24*60*60 �� = 86400 ��
24 Сʱ�ı䶯 = 86400 * 200us = 17.28 ��
��24MHz(1 ����=0.5us),1ms �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ�������:
1ms �ж�һ��=> ÿ���ж�1000 ��,ÿ��/�̶ȵ���: 1000 * 0.5us = 500us
��24MHz(1 ����=0.5us),200us �ж�һ��Ϊ例��ÿ��һ�̶���1 ���ڵ������:
200us �ж�һ��=> ÿ���ж�5000 ��,ÿ��/�̶ȵ���: 5000 * 0.5us = 2.5ms
************************************************** *******/
#define MICRO_ADJUST 22 //�ӿؼ�ʱȷ����
#define TICK_PERIOD ((65536-TICK_INTERRUPT_PERIOD_CNT)+MICRO_ADJUST)
unsigned int SystemTick; //ϵͳ�ӿؼ�ʱֵ
unsigned int RetTick;
/*================================================ ========
��ȡϵͳ�ӿؼ�ʱֵ
================================================== ======*/
unsigned int GetSystemTick(void)
{
#pragma asm
/* ץȡϵͳ�ӿ�ֵ */
MOV A,SystemTick+01H
MOV RetTick+01H,A
MOV A,SystemTick
MOV RetTick,A
/* �Ƚ�ϵͳ�ӿ�ֵ���ޱ仯 */
MOV A,SystemTick+01H
CJNE A,RetTick+01H,DiffByInterrupt
MOV A,SystemTick
CJNE A,RetTick,DiffByInterrupt
/* ϵͳ�ӿ�ֵ���ޱ仯 */
JMP GtRet
/* ϵͳ�ӿ�ֵ�����ж϶��仯������ץȡϵͳ�ӿ�ֵ*/
DiffByInterrupt:
MOV A,SystemTick+01H
MOV RetTick+01H,A
46
MOV A,SystemTick
MOV RetTick,A
GtRet:
#pragma endasm
return(RetTick); /* ����ϵͳ�ӿ�ֵ */
}
/*------------------------------------------
��ʼϵͳ�ӿؼ�ʱ���ж��趨����[20]
------------------------------------------*/
void InitTick(void)
{
SystemTick = 0; //���ϵͳ�ӿؼ�ʱֵ
TMOD &= 0xf0; /* �����ʱģʽ����λԪ*/
TMOD |= 0x1; /* �趨 16 λԪ��ʱ */
TR0 = 0; /* ֹͣ��ʱ */
TF0 = 0; /* �����ʱ��λ��� */
TH0 = TICK_PERIOD >> 8; /* ����ϵͳ�ӿؼ�ʱֵ��λԪ��*/
TL0 = (unsigned char)TICK_PERIOD; /* ����ϵͳ�ӿؼ�ʱֵ��λԪ��*/
//PT0 = 1; //ϵͳ�ӿ��ж�Ϊ�������Ȩ
TR0 = 1; /* ��ʼ��ʱ */
ET0 = 1; /* ���ܼ�ʱ��0 �ж� */
EA = 1; /* �����жϿ��� */
}
/*------------------------------------------
ϵͳ�ӿؼ�ʱ�жϷ���ʽ
------------------------------------------*/
void timer0 (void) interrupt 1 using 1
{
TR0 = 0; //ֹͣ��ʱ
TH0 = TICK_PERIOD >> 8; //���ظ�λԪ��
TL0 = (unsigned char)TICK_PERIOD; //���ص�λԪ��
TR0 = 1; //��ʼ��ʱ
SystemTick++; //����ϵͳ��ʱʱ��
ScanSensorIn(); //ɨ�鰴ť狀̬
}
���ۣ�
�����������不�ѷ��������������了���Է����������ƣ����ӵ������ĵ�路�����뺸�ӣ���е������������켰���ϸ�����Ŀ�����力������˵�������о���Ӧ����ѵ���ģ���˵��Լ�����ij�Ʒ�����������Ȼʮ��ϲ�á���Ȼ�����������Ĺ����У�Ҳ�������������ѣ��ڳ�����Ʋ��֣��Լ���д�ij�������不�ܷ���Ԥ�ڵĶ�������һ���ģ������ϸ��ֵ�路ʱһֱ��������路����ϴ了��ϴ�����Ӻ����ֳ����������ͷ�����������˳利�Ľ�����⣬���������������了�� �������ڼ��������ѧϰ��不�ٶ�������ǿ了�����ڵ�������ӡ���е�����Ƽ�������Ƶ���Ӳ�����֪��ʵ����力���ر��Ƕ�8051������в��������֪ʶ��了更��һ����˽�����Щ都������ʱ�õ��ı����ջ���ΰ��Լ���ѧ���Ķ���Ӧ���������У������������յ�Ŀ�ġ���ͼ������Ƶ����߳�ȫò:
�ο����ף�
[1]Weidemann H. J., Pfeiffer F. and Eltze J., "The Six-Legged TUM WalkingRobot" ,
Proceedings of the IEEE/RSJ/GI International Conference on Intelligent Robots
andSystems, 2005. Vol.2, pp.1026~1033,
[2]Bajd T. and Karcnik T., "Unstable States in Four-legged Locomotion",Proceedings
of the IEEE/RSJ/GI International Conference on Intelligent Robots and Systems,
Vol.2, 1994. pp.1019~1025,
[3]�����.�����Ӿ������߳���·ʶ������������.�㽭���̴�ѧ,2010-2
[4]¬����.���߳���ת������㷨��MATLAB��ʵ�� .����ũҵ��ѧѧ��2011-3,
[5]������.8051 ���߳�������ƹ�������Ӧ�ÿƼ���ѧ.2010-7
[6]������.�����߿������߳�.2011-8
[7]��٩.����Ƭ���߳�. .2011-5
[8]�º�ά.���˰��˳�.2008-1
[9]���Ź�.�в����߳�. 2010-5