0 ǰ��
���������ŵ������Ӽ����Ŀ��ٷ�չ����С���ʵ�Դ�Ĺ㷺Ӧ�ã����ǶԵ�Դ�ĸ�Ч�ʡ��߹����ܶȡ�����ѹ���ȺͿ���Ӧ�ٶȵ�����Ҫ��Ҳ������ߣ�һЩӦ���ڿ��ص�Դ���µĿ����㷨�����о���Ӧ�á��������ģ��PID�Ŀ��Ʒ����ͻ���ģ����Ԫ��ɢ�����㷨�ڵ�Դ��̬�����еõ��˺ܺõĿ���Ч��������������Ӧ���У�����Ҫ��任���������õĵ������ܣ���Ҫ���Դ�����ѹ�ܿ��ٸ���仯�ĸ������ֵ�����Ҫ��任�����кܺõĸ������ܡ�
���ڼ�Buck��·����ĵ�ѹ���ȶ������ܵ����غ��ⲿ�ĸ��ţ�����Buck�任�����еķ����ԣ����Խ�����ȷ����ѧģ�ͣ������ڲ��ö���Buck�����ĵ�·��ģ���ѽ��������Ŀǰ�����ϴ�����PID��������ʵ�ֱջ�������ʵ�������ѹ���������ȶ������dz���PID���ƾ��в����������ӣ�����ʱ�䳤��ȱ�㡣��Ȼģ�����Ƶ��ŵ��ڶ࣬����Ҳ��������̬�̶Ȳ��ߵ�ȱ�㣬Ȼ������ӦPID���ƿ��������Ӧ�㷨��ͨ����������ģ���������IJ������߿��ƹ��Ӷ���ǿ��ģ��������������Ӧ����������˿���ϵͳ�Ķ���̬���ܺ�³���ԡ�����ͨ��Matlab�Ľ�ģ������˵���˳���PID���ƵIJ��㣬�Լ�����ӦPID����Խ�ԡ�
1.BUCK�任������������
����PID������ͼ1.1��ʾ�Ǹ���ƫ��ı�����P)�����֣�I)���֣�D)���п��ƣ��ǿ���ϵͳ��Ӧ����Ϊ�㷺��һ�ֿ��ƹ��ɡ�ͨ���������������ֺ������������ʹ�ô������ҵ����ϵͳ������õıջ��������ܡ�����һ�����Կ��Ʒ�������ͨ���趨ֵ��ʵ��ֵ����ƫ���ƫ��ı���(P)������(I)����(D)ͨ��������Ϲ��ɿ��������Ա��ض�����п��ơ�������e(t)�����u(t)�Ĺ�ϵΪ��
 ��1-1��
��1-1��
����䴫�ݺ���ʽ�ɱ�ʾΪ�� 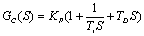
����ʽ��KpΪ����ϵ����TiΪ����ʱ�䳣����TdΪ��ʱ�䳣��������PID���Ƶı�����һ���������Կ����������ص㣺1���������죻2���ױ�������Ϥ�����գ�3������Ҫ������ѧģ�ͣ�4������Ч���ã�5������ϵͳ�ȶ���
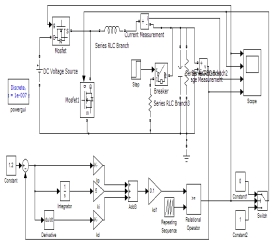
ͼ1.1 Buck��·�ij���PID����
����������ƶ���ľ�����ѧģ��ʱ��ֻҪ��ȷ�趨����Kp��Ki����Kd��PID���������ʵ�������ã������������Ų����IJ����������ܽ�����������ȱ�������ڹ�ҵ�����ձ�����ŷ�������ʱ���ԵȲ�ȷ������������ʱPID����Ч�������ԴﵽԤ�ڵ�Ŀ�꣬��������ʮ��������������ģ�����Ʋ������ڹ�ҵ����ģ��,����������ֵ�������������Ա���������ϵͳ����,������ϵͳ�Ķ�̬��Ϣ��ģ�����ƹ�����������Ի�ú��ʵĿ�����,��������д��ģ�����������뵽���̵Ŀ��ƻ����зdz��������Թ��̲����ı仯�������õ���Ӧ�ԣ����н�ǿ��³����,���һ�����͵�PID����˼��Ӧ�˶�����
2.��ṹģ��PID���������
�����ʵ��PID�������IJ��������Ե���,��ô�ͽ�һ��������PID������������,����Ӧ����ϵͳ�IJ����仯���������仯���о�������ģ�����ƺ�PID���ƵĽ������߿������ܵ���Ч�ֶ���Ϊ���ϵͳ�Ŀ��ƾ��Ⱥ�³�����������һ������ģ������PID���������������Ե����ķ���������Ӧģ��PID�����������E�����仯��Ec��Ϊ�������������㲻ͬʱ��ƫ��e��ƫ��仯��Ec��PID�����Ե�����Ҫ�����乫ʽ����F-PID�Ŀ����ʹ�ʽΪ��
 ��2-1��
��2-1��
���� 

����ģ�����ƹ����PID���������ı㹹��������Ӧģ��PIDϵͳ����ͼ2.1����ʾ,�ڱ�ϵͳ�У�ģ����PID���ƽ�����Ƶĺ��ģ�Ϊ���ĺû���ֱ��Ӱ�쵽Kp��Ki�ͺ�Kd��ѡȡ���Ӷ�Ӱ�쵽ϵͳ�Ŀ��ƾ��ȡ�
 ͼ 2.1 ģ��PID�Ŀ���ԭ��ͼ
ͼ 2.1 ģ��PID�Ŀ���ԭ��ͼ
��ϵͳ���ȶ��ԡ���Ӧ�ٶȡ�������������̬���ȵȷ��������ǣ�Kp��Ki��Kd���������£�
��1������ϵ��Kp�������Ǽӿ�ϵͳ����Ӧ�ٶȣ����ϵͳ�ĵ��ھ��ȡ�KpԽ��ϵͳ����Ӧ�ٶ�Խ�죬ϵͳ�ĵ��ھ���Խ�ߣ����ײ��������������ᵼ��ϵͳ���ȶ���Kpȡֵ��С����ή�;��ȣ�ʹ��Ӧ�ٶȻ������Ӷ��ӳ�����ʱ�䣬ʹϵͳ��̬����̬�����ƻ���
��2����������ϵ��Ki������������ϵͳ����̬��KiԽ��ϵͳ�ľ�̬�������Խ�죬��Ki��������Ӧ���̵ij��ڻ�������ֱ������Ӷ�������Ӧ���̵Ľϴ�����Ki��С��ʹϵͳ��̬�������������Ӱ��ϵͳ�ĵ��ھ��ȡ�
��3��������Kd�Ǹ���ϵͳ�Ķ�̬���ԣ���������Ҫ������Ӧ����������ƫ�����κη���仯����ƫ��仯������ǰԤ������Kd����ʹ��Ӧ������ǰ�ƶ����Ӷ��ӳ�����ʱ�䣬���һή��ϵͳ�Ŀ��������ܡ�
PID�������������뿼�ǵ��ڲ�ͬʱ���������������ü��֮��Ĺ�ϵ��ģ��������PID����PID�㷨�Ļ����ϣ�ͨ�����㵱ǰϵͳ���E�����仯��Ec������ģ���������ģ����������ѯģ�������в���������
3.����ӦPID���������㷨���
�ڱ���Ʒ����У�PID������������˼������ҳ�PID��3������Kp��Ki��Kd��ƫ��E��ƫ��仯��Ec֮���ģ����ϵ����������ͨ�����ϼ��E��Ec���ٸ���ģ�����ƹ�������3���������������ģ�������E��Ec�Կ����������IJ�ͬҪ�Ӷ�ʹ���ض���������õĶ��������ܡ�
��1���������������ȷ��
���ڶ�ϵͳ���������������ǽ�ƫ��E��ƫ����Ec��Ϊģ�����Ƶ����룬PID��������3������Kp��Ki����Kd��Ϊ�����
��2�����롢���������ģ����������
�趨�������E��Ec����ֵ��ģ���Ӽ�Ϊ{�����У���С���㣬��С�����У�����}������Ϊ{NB,NM,NS,ZO,PS,PM,PB},��ƫ��E��ƫ��仯��Ec��������-3��3���������ڡ�ͬ�����趨�����Kp��Ki��Kd��ģ���Ӽ�Ϊ{ZO,PS,PM,PB},����������������0��3���ڡ�������������������������߷ֱ���ͼ3.1�У�1������2����ʾ��

(1) ����E��EC��ū����������

��2�����Kp��Ki��Kd��ū����������
3.1 ū����������ͼ
ͨ��ģ�����������������ʱ�̵�����E��Ec������ͨ��ģ�����������õ����Ӧ�Ŀ�������ֵ���ٽ���ּ��ξ�ȷ���Ի���״̬��������ѡȡ�����Եó�ԭϵͳ�ķ�����ģ��Buck���������Ӷ������Buck��·ģ������������ơ�ģ��������PID����������ͼ3.2��ʾ��

ͼ3.2 ģ������Ӧ����PID��������������ͼ
ͨ�����ϵķ��������ǣ��ɴ�һ������Back��·������ӦPID�������Ľṹ��ͼ3.3��ʾ��������Buck��·Ϊ��������������ӦPID�������ϣ�ʵ�ֲ��������Զ�����,ʱ��̣����ڿ��ƣ�Ч���Ϻá�
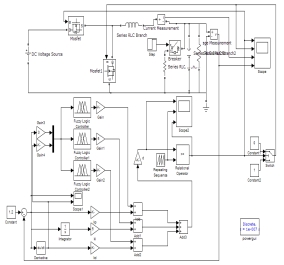
ͼ3.3 Buck��·������Ӧģ��PID����ԭ��ͼ
4 �����ʵ��������
Ϊ����֤���۷�������ȷ�ԣ����������ֳ���PID������ӦPID���õ�·�����������з�����֤����������ͼ4��
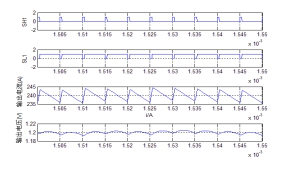
��a������PID������ѹ�������
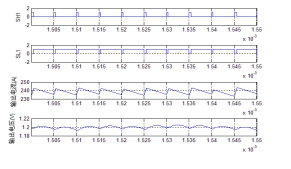 ��b������ӦPID������ѹ�������
��b������ӦPID������ѹ�������
ͼ4 ������
Ϊ����֤��Ƶ�Buck�仯��������ӦPID�������Ŀ������ܣ�������ģ�ͽ��з�����������볣��PID��������Ч�����бȽϣ���������������������ӦPID���Ƶ��㷨��ϵͳ����Ӧ�ٶȼӿ졢���ھ�����ߣ���̬���ܱ�ã�����û�г����������н�ǿ��³���ԡ����dz����PID��������ʵ�ֵġ�
��������ϵͳһ����Ծ��Ӧʱ��������ͼ4-2��ʾ
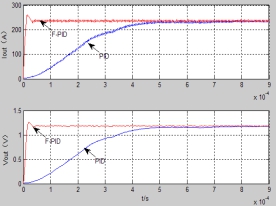
ͼ4.2����ӦPID��Ծ��Ӧ�������
�ɴ˿ɼ�����ӦPID����Ч���ã������ٶȿ죬��̬���С���ڵ�����һ����Ծ�źź��ڶ�ʱ���ڴﵽ��̬�����нϺõĿ���Ч����
5 �ܽ�
����ƵĻ���Ҫ���꾡�IJ�����������ݣ�����ԭ��������BUCK��·ԭ��������ӦPID������ƣ����ݺ����������㣬����Matlab/Simulink�н����˵�·��ģ���档��Դ�ͳ��Buck��·ϵͳ�������ó���PID���ƶ�����IJ������ı䡢ϵͳ�����ȶ���ȱ�㣬�������������ģ���㷨��ģ��PID��������3����������Kp��Ki��Kd�����Ż����ɳ�ַ���ģ��PID��������³���ԡ��봫ͳPID��������ȣ�������ʵ����������������ӦPID���к�ǿ��³���ԺͶ�̬���ܣ��ܺܺõ���Ӧ��·�仯����Ӧʱ��̣��ٶȸ���ȷ��
�����
[1]�����森C��DC���ر任����ģ���������ṹ���Ʒ������о�[D]��[��ʿѧλ����]������������ѧ�����ݣ�1 998��
[2]ŷ��������DC��DC���ر任���Ľ�ģ�������о�[D]��[��ʿѧλ����]���Ͼ����Ͼ����պ����ѧ��2004��
[3]�ֲ��Σ�DC��DC���ر任���ķ����Է����������о�[D]��[��ʿѧλ����]�����ݣ�����������ѧ��1997��
[4]zhou Luowei��A study of control methods in switching DC��DC power converters[D]��[doctor degree dissertations]��Chongqing��Chongqing University��2005��
[5]����ɣ���Դ�任Ӧ�ü���[M]����������е��ҵ�����磬2007��78-100��
[6]����ƽ�����ر任���Ľ�ģ�����[M]���������й����������磬2006��1��40��
[7]Vitor Fernao PiresJoseFemandoA��Silva��Teaching nonlinear modeling��simulation and control of electronic power converters using matlab/simulink[J]��Transactions on education��2002��45(3)��253��261j
[8]Muhamad��Nik Din Yatim��Abdul Halim Mohd��Shafie��Abd Jaafar��A pspice-based design of DC��DC converter��Systems[C]��National Power and Energy Conference (PECon)��Kuala Lumpur,Malaysia Institute of Electrical and Electronics Engineers
Computer Society,Piscataway,United States��2004��73��77��
[9]��ΰ�������ͣ�����Saber��Buck��·���������[J]������ϵͳ�����Զ���ѧ����2007 19(3)��122-124��
[10]Randall��Shaffer,Alan��Fundamentals of power electronics with matlab[M]��Boston��Charles��2007��282-3 1 5��
[11]Saurabh Kasat��Analysis��design and modeling of DC��DC converter using simulink[master degree dissertations]��Oklahoma��Oklahoma State University��2004��
[12]�ں����ȣ��ͼ�������Ƽ���[M]���������廪��ѧ�����磬2004��81-95��
[13]ʩ�����������У�DC��DC�任����ģ������ӦPID���Ʒ����о�[J]���人������ѧѧ����2006��28(8)��20��23��
[14]Tan Kok Kiong��Wang Qing-Guo��Hang Chieh��Advances in PID control[M]��London��
Springer-Verlag��1999.23-89��